Abstract
Reachability analysis has become increasingly important in robotics to distinguish safe from unsafe states. Unfortunately, existing reachability and safety analysis methods often fall short, as they typically require known system dynamics or large datasets to estimate accurate system models, are computationally expensive, and assume full state information. A recent method, called MORALS, aims to address these shortcomings by using topological tools to estimate Regions of Attraction (ROA) in a low-dimensional latent space. However, MORALS still relies on full state knowledge and has not been studied when only sensor measurements are available. This paper presents Visual Morse Graph-Aided Estimation of Regions of Attraction in a Learned Latent Space (V-MORALS). V-MORALS takes in a dataset of image-based trajectories of a system under a given controller, and learns a latent space for reachability analysis. Using this learned latent space, our method is able to generate well-defined Morse Graphs, from which we can compute ROAs for various systems and controllers. V-MORALS provides capabilities similar to the original MORALS architecture without relying on state knowledge, and using only high-level sensor data. Our project website is at: https://v-morals.onrender.com.
Method Overview
End-to-end pipeline of V-MORALS: from visual trajectories to Morse graphs and regions of attraction.
V-MORALS performs reachability and safety analysis directly from visual observations, without access to system dynamics or full state information. Given image-based trajectories collected under a fixed controller, the method proceeds in three main stages:
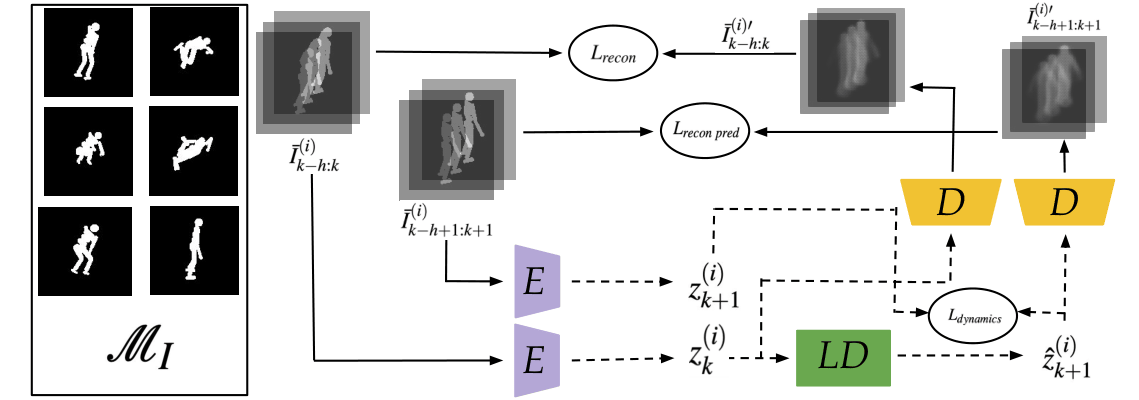
- Latent Representation Learning. Short sequences of images are encoded using a 3D convolutional autoencoder, producing a compact latent space that captures the system’s underlying dynamics while mitigating partial observability.
- Dynamics Modeling. Transitions between latent states are learned from the encoded trajectories, forming a discrete approximation of the system’s behavior in the learned space.
- Morse Graph Construction and ROA Discovery. The latent space is discretized to construct a Morse graph, which summarizes global system behavior. Attractors and their associated Regions of Attraction (ROAs) are then identified directly from this graph.
By operating entirely on image-based data, V-MORALS extends the original MORALS framework to vision-only settings and enables interpretable reachability analysis from high-dimensional sensory inputs.
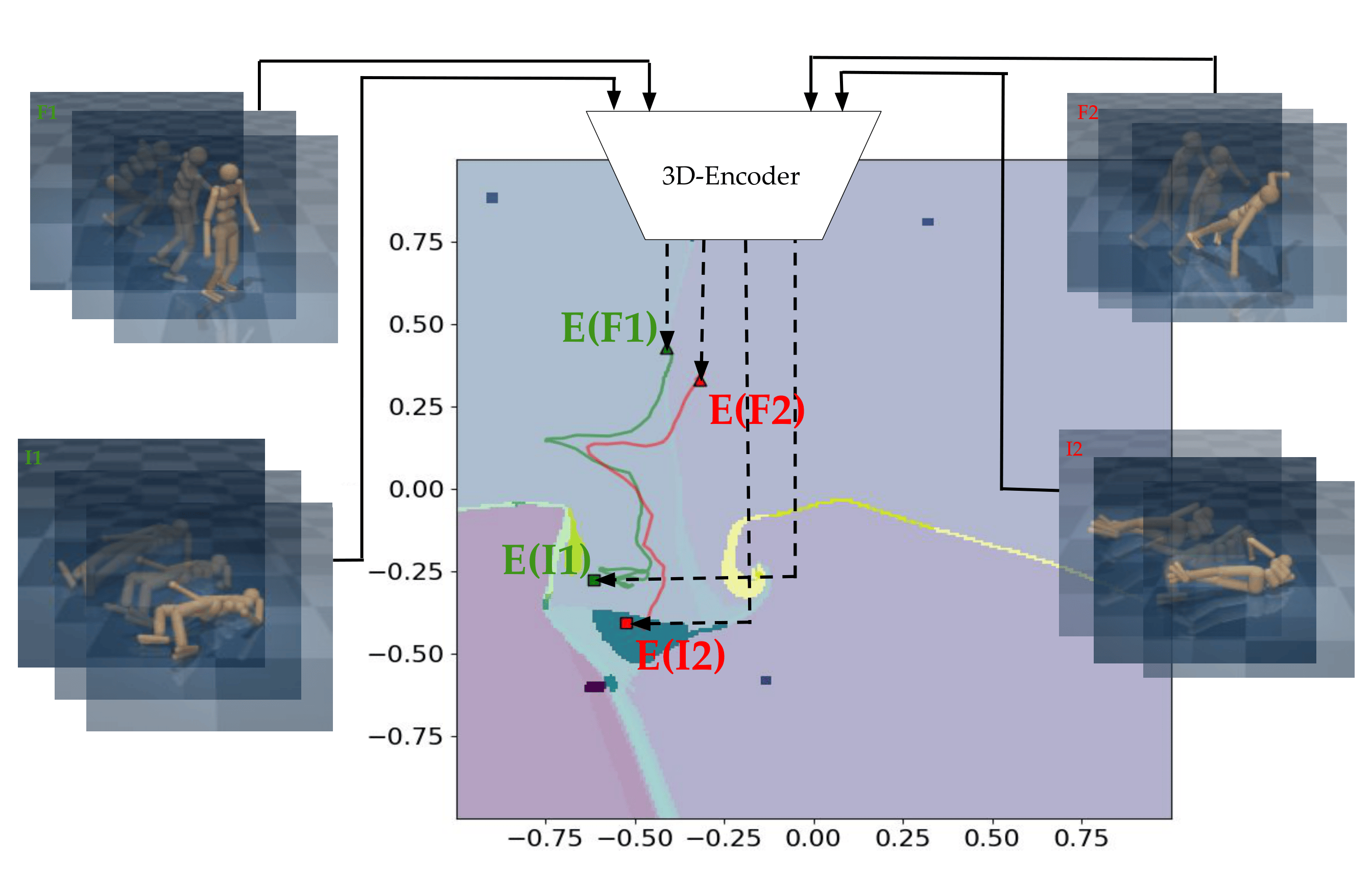
Encoder used to learn a compact latent representation from image sequences.
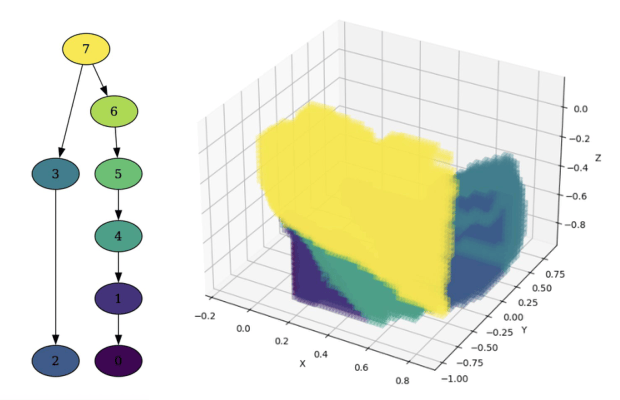
Morse graph constructed in the learned latent space, revealing attractors and regions of attraction.
Video Rollouts
This is the trajectory rollout of a humanoid in 3D latent space: the square marks the start position, the circle shows the current position, and the triangle indicates the goal
This is a trajectory rollout of a humanoid within a latent space of 2 dimensions. We see that the final states are located in different regions.
This is a trajectory rollout of a Pendulum within a latent space of 2 dimensions. Although both trajectories start in the same region (due to similar positions), we see that the final states are in distinct regions.
This is a trajectory rollout of a CartPole within a latent space of 2 dimensions.
BibTeX
@inproceedings{aladin2026vmorals,
title={{V-MORALS: Visual Morse Graph-Aided Estimation of Regions of Attraction in a Learned Latent Space}},
author={Faiz Aladin and Ashwin Balasubramanian and Lars Lindemann and Daniel Seita},
booktitle={International Conference on Robotics and Automation (ICRA)},
Year={2026}}